Το ρομπότ


Tο ρομπότ μας αποτελείται έχει δύο εκδόσεις μία ανθρωποειδούς και μια αυτοκινούμενου με ρόδες και αποτελείται από:
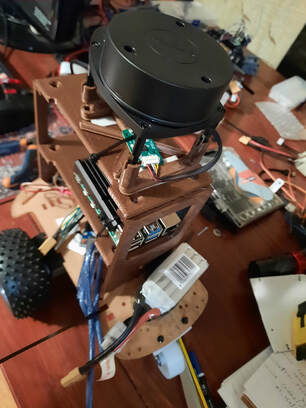
•1 raspberry pi 4
•1 RP LIDAR
•1 Arduino UNO
•10 σερβομηχανισμοί για τα πόδια
•2 Dcmotors για την έκδοση που κινείται σε τροχούς
•1 lipo μπαταρία
•Καλώδια
•1 motorshield
•1 επέκταση για τους servo
• 1 IMU
• Encoders
•PLA
Ο προϋπολογισμός μας για την κατασκευή του ρομπότ είναι: 200 Ευρώ.
Με αυτόν τον περιορισμό επιλέγουμε μικρό ύψος για το ανθρωποειδές προκειμένου να μην χρειαστούμε ισχυρότερα μοτέρ και κατασκευάζουμε τα μέρη του ρομπότ από PLA με τρισδιάστατη εκτύπωση.
Σημ.: στον προϋπολογισμό δεν έχει συμπεριληφθεί η κατανάλωση ρεύματος από τον 3d εκτυπωτή.
Για τον σκελετό του ρομπότ επιλέγουμε μία modular κατασκευή βασισμένη σε συνδέσμους.
•Τυπώνουμε δοκιμαστικά διάφορα έτοιμα modules από το thingiverse και καταλήγουμε στα κινητά μέρη που μας εξυπηρετούν.
•Οι εκτυπώσεις γίνονται στον δικής μας κατασκευής 3d εκτυπωτή.
Στις συνδέσεις των κινητών μερών τοποθετούνται μοτέρ τύπου servo 996R.
•Οι servo δεν επιστρέφουν την πληροφορία της γωνίας της θέσης τους
•Για την υλόποιηση του inverse kinematics απαιτείται αυτή η πληροφορία
•Τροποποίησαμε τους servo ώστε να λαμβάνουμε την πληροφορία αυτή από το ποτενσιόμετρο του σερβομηχανισμού.
•1 raspberry pi 4
•1 RP LIDAR
•1 Arduino UNO
•10 σερβομηχανισμοί για τα πόδια
•2 Dcmotors για την έκδοση που κινείται σε τροχούς
•1 lipo μπαταρία
•Καλώδια
•1 motorshield
•1 επέκταση για τους servo
• 1 IMU
• Encoders
•PLA
Ο προϋπολογισμός μας για την κατασκευή του ρομπότ είναι: 200 Ευρώ.
Με αυτόν τον περιορισμό επιλέγουμε μικρό ύψος για το ανθρωποειδές προκειμένου να μην χρειαστούμε ισχυρότερα μοτέρ και κατασκευάζουμε τα μέρη του ρομπότ από PLA με τρισδιάστατη εκτύπωση.
Σημ.: στον προϋπολογισμό δεν έχει συμπεριληφθεί η κατανάλωση ρεύματος από τον 3d εκτυπωτή.
Για τον σκελετό του ρομπότ επιλέγουμε μία modular κατασκευή βασισμένη σε συνδέσμους.
•Τυπώνουμε δοκιμαστικά διάφορα έτοιμα modules από το thingiverse και καταλήγουμε στα κινητά μέρη που μας εξυπηρετούν.
•Οι εκτυπώσεις γίνονται στον δικής μας κατασκευής 3d εκτυπωτή.
Στις συνδέσεις των κινητών μερών τοποθετούνται μοτέρ τύπου servo 996R.
•Οι servo δεν επιστρέφουν την πληροφορία της γωνίας της θέσης τους
•Για την υλόποιηση του inverse kinematics απαιτείται αυτή η πληροφορία
•Τροποποίησαμε τους servo ώστε να λαμβάνουμε την πληροφορία αυτή από το ποτενσιόμετρο του σερβομηχανισμού.
•Χρησιμοποιούμε το Robot Operating System (ROS) το οποίο είναι λογισμικό με δυνατότητα σύνδεσης πολλών διαφορετικών κόμβων.
•Κόμβοι: λογισμικό που εκτελεί συγκεκριμένες λειτουργίες
•Το ROS τρέχει πάνω σε raspberry PI4, κάποιοι κόμβοι σε python τρέχουν επίσης πάνω στο raspberry, ενώ κάποιοι σε C++ πάνω σε Arduino.
•Η χαρτογράφηση χώρου γίνεται με τη χρήση του RP LIDAR.
•Η δημιουργία χάρτη και αποθήκευσή του γίνεται με τη χρήση λογισμικού SLAM
